






















সব পণ্য
-
মাইক্রো স্টিপার মোটর
-
স্থায়ী চুম্বক Stepper মোটর
-
গিয়ার স্টেপার মোটর
-
লিনিয়ার স্টেপার মোটর
-
স্লাইডার Stepper মোটর
-
হাইব্রিড স্টিপার মোটর
-
ছোট ডিসি গিয়ার মোটর
-
ROV থ্রাস্টার মোটর
-
মাইক্রো মেটাল গিয়ারমটার
-
মাইক্রো গিয়ারবক্স
-
অবস্থান নিয়ন্ত্রণ Stepper মোটর
-
3 ডি প্রিন্টার স্টিপার মোটর
-
Stepper মোটর ড্রাইভার
-
ডিসি মোটর কন্ট্রোলার
-
লিড স্ক্রু এবং বাদাম
-
 আন্দ্রেস ব্লাঙ্কোথ্রাস্টারটি সঠিকভাবে এসেছে। আমি তাদের আরওভিতে পরীক্ষা করেছি এবং ফলাফলটি নিয়ে আমরা খুব খুশি। ইপোক্সি ইন্টিরিয়ার ফিনিসটি খুব ভাল এবং আকারের সাথে মোটরগুলির শক্তি বেশ ভাল।
আন্দ্রেস ব্লাঙ্কোথ্রাস্টারটি সঠিকভাবে এসেছে। আমি তাদের আরওভিতে পরীক্ষা করেছি এবং ফলাফলটি নিয়ে আমরা খুব খুশি। ইপোক্সি ইন্টিরিয়ার ফিনিসটি খুব ভাল এবং আকারের সাথে মোটরগুলির শক্তি বেশ ভাল। -
গ্রেগোয়ার ল্যাঞ্জচ্যাংঝু ভিক-টেক মোটর টেক এবং আমাদের সংস্থার মধ্যে সহযোগিতা ছিল মাত্র দুর্দান্ত। আমাদের প্রয়োজনগুলি সম্পর্কে ভাল বোঝা, আমাদের সমস্যাগুলি সমাধান করার জন্য দুর্দান্ত। আমি সুপারিশ!
-
ডেভিড মোলেভেল্টপেশাদার এবং স্পষ্ট যোগাযোগ। অর্ডার সময়মতো প্রেরণ করা হয়েছিল। কাউন্টার সংযোগকারী যেখানে চালানের সাথে যুক্ত হয়। ড্রাইভার যেমন আমরা সম্মত!
-
বিল্ডস্টর্ম প্রাইভেট লিমিটেডপণ্যটি প্রত্যাশার মতো কাজ করে, এটি দুর্দান্তভাবে প্যাক করা হয়েছিল। বিক্রেতা খুব দ্রুত সাড়া দেয় এবং কেনার সিদ্ধান্ত নিতে সহায়তা করে। তারা আপনার জন্য পণ্য কাস্টমাইজ করতে প্রস্তুত।
-
অ্যাশলে গ্রিফিনচালানটি খুব দ্রুত প্রাপ্ত হয়েছিল। প্যাকেজিং দ্বারা পণ্যটি সুরক্ষিত ছিল। সংস্থার প্রতিনিধি সৌম্যময় ও সদয় ছিল। একটি প্লাস রেটিং!
12 ভোল্ট ব্রাশলেস ডিসি মোটর কন্ট্রোলার একাধিক প্রোটিনের সাথে SWT-256M









| উৎপত্তি স্থল | জিয়াংসু, চীন (মেইনল্যান্ড) |
|---|---|
| পরিচিতিমুলক নাম | VIC-TECH |
| সাক্ষ্যদান | RoHS |
| মডেল নম্বার | তায়ালা-256M |
| ন্যূনতম চাহিদার পরিমাণ | 1 ইউনিট |
| মূল্য | $20~30/unit |
| প্যাকেজিং বিবরণ | স্ট্যান্ডার্ড রপ্তানি প্যাকেজ, বা কাস্টমাইজড করা যাবে |
| ডেলিভারি সময় | পেমেন্ট নিশ্চিত করার 15 দিন পরে |
| পরিশোধের শর্ত | T/T, ওয়েস্টার্ন ইউনিয়ন, MoneyGram, |
| যোগানের ক্ষমতা | প্রতি মাসে 10000 ইউনিট |
পণ্যের বিবরণ
| মোটর ধরন | stepper মোটর | ভোল্টেজ, বৈদ্যুতিক একক বিশেষ | 12V |
|---|---|---|---|
| ওজন | 250g | ||
| বিশেষভাবে তুলে ধরা | brushless ডিসি মোটর নিয়ামক,4 তারের stepper মোটর নিয়ামক |
||
পণ্যের বর্ণনা
স্থায়ী চুম্বক stepper মোটর এবং সংকর মোটর জন্য SWT-256M মাইক্রো stepper মোটর ডিসি মোটর নিয়ামক
SWT-256M উন্নত বিশুদ্ধ সাইনাসোডাল স্পষ্টতা বর্তমান নিয়ন্ত্রণ প্রযুক্তি ব্যবহার করে আমাদের কারখানা দ্বারা ডিজাইন করা একটি উচ্চ-কর্মক্ষমতা উপবিভাজিত স্টেপার মোটর ড্রাইভার। SWT-256M দ্বারা গৃহীত বিশুদ্ধ সাইনাসোডিয়াল স্পষ্টতা বর্তমান নিয়ন্ত্রণ প্রযুক্তিটি উপরের সমস্যাগুলি ভালভাবে উন্নত করতে পারে, যাতে স্ট্যাপিং মোটরের চলমান প্রভাব সার্ভ স্তরের কাছাকাছি কিছুটা হয়।
এই ড্রাইভটিতে একাধিক উপবিভাগ, ছোট আকার, একাধিক সুরক্ষা এবং স্বয়ংক্রিয় আধা-প্রবাহ ফাংশন রয়েছে। ব্যবহারকারীরা 40VDC পর্যন্ত SWT-256M ভোল্টেজ ব্যবহার করতে পারেন।

যান্ত্রিক মাত্রা: এমএম
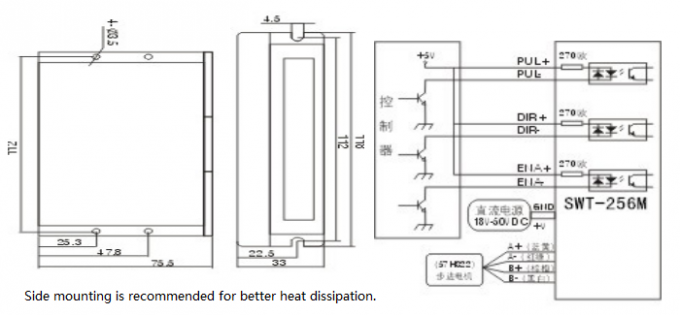
দ্বিতীয়, তারের নির্দেশাবলী
1.P1 দুর্বল তারের সংকেত বিবরণ
সংকেত ফাংশন
PUL + (+ 5V) পালস সংকেত: পালস নিয়ন্ত্রণ সংকেত, পালস এর ক্রমবর্ধমান প্রান্ত এই সময়ে বৈধ; P-5 উচ্চ স্তরে 4-5V এবং নির্ভরযোগ্য প্রতিক্রিয়ার জন্য 0-0.5V নিম্ন স্তরে, পালস প্রস্থ 1μS এর চেয়েও বেশি। যদি + 12 ভি বা + 24 ভি ব্যবহৃত হয়, স্ট্রিং প্রতিরোধক বর্তমান সীমাবদ্ধতা প্রয়োজন।
PUL- (Pul)
ডিআইআর + (+ 5V) দিক সংকেত: উচ্চ / নিম্ন স্তরের সংকেত, মোটর নির্ভরযোগ্য প্রতিক্রিয়া নিশ্চিত করার জন্য, সামনে এগিয়ে এবং মোটর বিপরীত। ডাল সংকেত আগে অন্তত 5μs দিক নির্দেশ করা উচিত। মোটর এর প্রাথমিক চলমান দিক মোটর এর তারের সাথে সম্পর্কিত হয়। যেকোনো পর্যায়ে ঘুরে বেড়ানোর (যেমন A +, A-বিনিময়) মোটরটির প্রাথমিক চলমান দিক পরিবর্তন করতে পারে। যখন ডিআইআর-উচ্চ স্তরের 4 -5V, নিম্ন স্তরের 0-0.5V।
DIR- (থেকে DIR)
ENA + (+ 5V) সিগন্যাল সক্ষম করুন: এই ইনপুট সংকেতটি সক্রিয় / নিষ্ক্রিয়, উচ্চ স্তরের সক্ষম করতে ব্যবহৃত হয় এবং নিম্ন স্তরের ড্রাইভারটি কাজ করে না। স্বাভাবিক পরিস্থিতিতে, আপনাকে সংযোগ করতে হবে না, যাতে এটি স্থগিত করা হয় এবং স্বয়ংক্রিয়ভাবে সক্ষম হয়।
ENA- (ENA)
2.P2 শক্তিশালী ইন্টারফেস বর্ণনা
ইন্টারফেস ফাংশন
জিএনডি ডিসি ক্ষমতা স্থল
+ ভি ডিসি পাওয়ার সাপ্লাই ইতিবাচক, + 30V- + 40V এর মধ্যে যেকোনো মান ব্যবহার করা যেতে পারে, কিন্তু প্রস্তাবিত মান + 36VDC।
A +, A- মোটর A ফেজ। A +, A-intermodulation, মোটর চলমান দিক পরিবর্তন করতে পারে।
বি +, বি-মোটর বি ফেজ। B +, B-intermodulation, মোটর চলমান দিক পরিবর্তন করতে পারেন।
পণ্য বিস্তারিত উপস্থাপনা


বর্তমান, উপবিভাগ ডিআইপি সুইচ সেটিং
কাজ (গতিশীল) বর্তমান সেটিং
| বর্তমান শিখর | SW1 | SW2 | SW3 | |
| 1.4a | অফ | অফ | অফ | |
| 2.1 | উপর | অফ | অফ | |
| 2.7A | অফ | উপর | অফ | |
| 3.2A | উপর | উপর | অফ | |
| 3.8A | অফ | অফ | উপর | |
| 4.3A | উপর | অফ | উপর | |
| 4.9A | অফ | উপর | উপর | |
| 5.6A | উপর | উপর | উপর |
উপবিভাগ সেটিং
সাবডিভিশন নির্ভুলতা SW5-SW8 চার-অবস্থান ডায়াল সুইচ দ্বারা সেট করা হয়
উপবিভাগ ফ্যাক্টর | পদক্ষেপ / বৃত্ত (1.8 ডিগ্রি / পূর্ণ ধাপ) | SW5 | SW6 | SW7 | SW8 |
| 2 | 400 | অফ | উপর | উপর | উপর |
| 4 | 800 | উপর | অফ | উপর | উপর |
| 8 | 1600 | অফ | অফ | উপর | উপর |
| 16 | 3200 | উপর | উপর | অফ | উপর |
| 32 | 6400 | অফ | উপর | অফ | উপর |
| 64 | 12800 | উপর | অফ | অফ | উপর |
| 128 | 25600 | অফ | অফ | অফ | উপর |
| 5 | 1000 | উপর | উপর | উপর | অফ |
| 10 | 2000 | অফ | উপর | উপর | অফ |
| 20 | 4000 | উপর | অফ | উপর | অফ |
| 25 | 5000 | অফ | অফ | উপর | অফ |
| 40 | 8000 | উপর | উপর | অফ | অফ |
| 50 | 10000 | অফ | উপর | অফ | অফ |
| 100 | 20000 | উপর | অফ | অফ | অফ |
| 125 | 25000 | অফ | অফ | অফ | অফ |
( 1) একটি stepper মোটর এবং একটি stepper ড্রাইভ কি? ড্রাইভার FAQ FAQ ব্যবহারকারী উত্তর (প্রশ্ন ও উত্তর)
স্টেপার মোটর স্পেস এবং অবস্থান সুনির্দিষ্ট নিয়ন্ত্রণ জন্য বিশেষভাবে ডিজাইন করা একটি বিশেষ মোটর। এর ঘূর্ণনটি একটি নির্দিষ্ট কোণে পদক্ষেপ দ্বারা পরিচালিত হয় ("পদক্ষেপ কোণ" বলা হয়), সুতরাং এটি স্টেপ্টার মোটর বলা হয়। এর বৈশিষ্ট্যাবলী হল কোন সংশ্লেষিত ত্রুটি নেই, নিয়ামক থেকে প্রেরিত প্রতিটি পালস সংকেত প্রাপ্ত হয় এবং মোটর চালকের ড্রাইভের নীচে একটি নির্দিষ্ট কোণে চালায়, তাই এটি বিভিন্ন খোলা-লুপ নিয়ন্ত্রণে ব্যাপকভাবে ব্যবহৃত হয়।
Stepping ড্রাইভার একটি শক্তি পরিবর্ধক যে stepping মোটর কাজ করতে পারেন। এটি নিয়ামক দ্বারা পাঠানো পাল্টা সংকেত রূপান্তর মোটর শক্তি সংকেত মধ্যে রূপান্তর করতে পারেন। মোটর গতি pulse ফ্রিকোয়েন্সি অনুপাতিক, তাই নিয়ন্ত্রণ পালস ফ্রিকোয়েন্সি অবিকল সুসংগত করা যেতে পারে। গতি, নিয়ন্ত্রণ ডাল সংখ্যার সঠিকভাবে স্থাপন করা যেতে পারে।
(২) ড্রাইভের ভাঙ্গন কি?
স্টেপার মোটরটি তার নিজের অনন্য কাঠামোর দ্বারা নির্ধারিত হয় এবং "মোটরের অন্তর্নিহিত পদক্ষেপ কোণ" (যেমন 1.2 ° / 0.6 °) কারখানায় প্রদর্শিত হয়। যাইহোক, অনেক স্পষ্টতা নিয়ন্ত্রণ এবং অনুষ্ঠানগুলিতে, পুরো পদক্ষেপের কোণটি খুব বড়, নিয়ন্ত্রণ নির্ভুলতা প্রভাবিত করে এবং
কম্পন খুব বড়। অতএব, এটি অনেক পদক্ষেপে একটি মোটরের অন্তর্নিহিত পদক্ষেপ কোণটি পূরণ করতে হবে। এটি একটি উপবিভাগ ড্রাইভ বলা হয় এবং এই ফাংশন বুঝতে পারেন। ইলেকট্রনিক ডিভাইস একটি subdivision ড্রাইভার বলা হয়।
(3) উপবিভাগ ড্রাইভারের সুবিধা কী?
প্রতিটি ধাপে পাস হওয়া ধাপে কোণটি হ্রাস হওয়ার কারণে, ধাপ একরূপতা উন্নত হয়, তাই নিয়ন্ত্রণ নির্ভুলতা উন্নত করা যেতে পারে।
মোটর কম্পন ব্যাপকভাবে হ্রাস করা যেতে পারে। কম ফ্রিকোয়েন্সি অসিলেশন স্টেপার মোটর একটি অন্তর্নিহিত চরিত্রগত। উপবিভাগ এটি মুছে ফেলার সেরা উপায়।
এটি কার্যকরভাবে টর্ক তরঙ্গ কমাতে এবং আউটপুট টর্ক বৃদ্ধি করতে পারেন।
এই সুবিধাটি সাধারণত ব্যবহারকারীদের দ্বারা স্বীকৃত এবং তাদের সুবিধাগুলি আনতে হয়, তাই এটি সুপারিশ করা হয় যে আপনি উপবিভাগ ড্রাইভার ব্যবহার করেন।
(4) কেন আমার মোটর এক দিক থেকে কাজ করে?
- সম্ভাব্য দিক সংকেত খুব দুর্বল, বা তারের polarity ভুল, বা সংকেত ভোল্টেজ বর্তমান সীমাবদ্ধ প্রতিরোধী দিক বার্ন খুব বেশী।
পালস মোড মেলে না, সংকেত পালস / দিক, ড্রাইভার এই মোড সেট করা আবশ্যক; যদি সিউড / সিডব্লিউড (ডাবল পালস মোড) থাকে তবে ড্রাইভারটি এই মোডেও থাকতে হবে, না হলে মোটরটি কেবলমাত্র এক দিক থেকে চলবে।
প্রস্তাবিত পণ্য